您现在的位置是: 网站首页> 学习笔记 学习笔记
ubuntu18.04安装Melodic版ros
2022-09-13 [ros] 8439人已围观
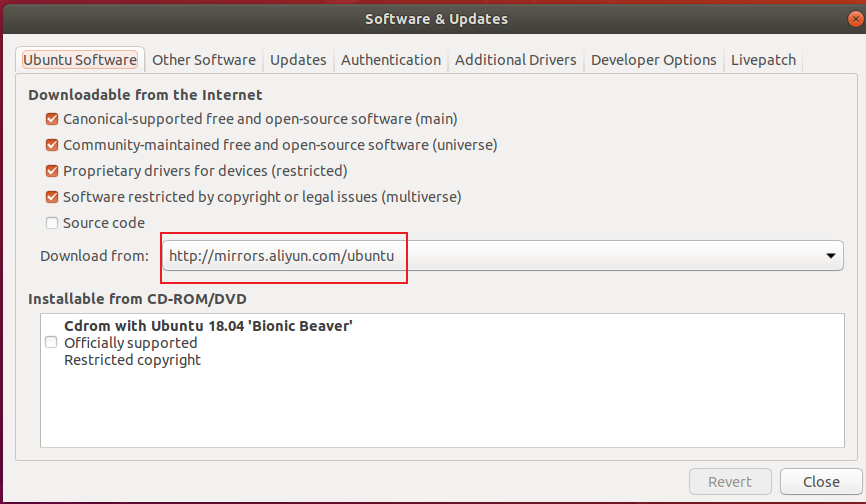
环境: 新装的一个虚拟机,系统ubuntu18.04桌面版;
先改一下系统源:

设置ros源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥:
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
设置结果如下:
Executing: /tmp/apt-key-gpghome.54A6wOMJsp/gpg.1.sh --keyserver hkp://keyserver.ubuntu.com:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
gpg: key 5523BAEEB01FA116: public key "ROS Builder <rosbuild@ros.org>" imported
gpg: Total number processed: 1
gpg: imported: 1
更新Ubuntu
sudo apt update
更新可能会报错,错误如下:
Hit:1 http://mirrors.aliyun.com/ubuntu bionic InRelease
Hit:2 http://mirrors.aliyun.com/ubuntu bionic-updates InRelease
Hit:3 http://mirrors.aliyun.com/ubuntu bionic-backports InRelease
Get:4 http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease [4,680 B]
Hit:5 http://mirrors.aliyun.com/ubuntu bionic-security InRelease
Err:4 http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease
The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
Reading package lists... Done
W: GPG error: http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease: The following signatures couldn't be verified because the public key is not available: NO_PUBKEY F42ED6FBAB17C654
E: The repository 'http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
解决方法:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
解决结果如下:
Executing: /tmp/apt-key-gpghome.QReyslKfKy/gpg.1.sh --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
gpg: key F42ED6FBAB17C654: public key "Open Robotics <info@osrfoundation.org>" imported
gpg: Total number processed: 1
gpg: imported: 1
再更新就可以了:
yfm@ubuntu:~$ sudo apt update
Hit:1 http://mirrors.aliyun.com/ubuntu bionic InRelease
Get:2 http://mirrors.ustc.edu.cn/ros/ubuntu bionic InRelease [4,680 B]
Hit:3 http://mirrors.aliyun.com/ubuntu bionic-updates InRelease
Hit:4 http://mirrors.aliyun.com/ubuntu bionic-backports InRelease
Get:5 http://mirrors.ustc.edu.cn/ros/ubuntu bionic/main amd64 Packages [797 kB]
Hit:6 http://mirrors.aliyun.com/ubuntu bionic-security InRelease
Get:7 http://mirrors.ustc.edu.cn/ros/ubuntu bionic/main i386 Packages [28.5 kB]
Fetched 825 kB in 1s (1,378 kB/s)
Reading package lists... Done
Building dependency tree
Reading state information... Done
All packages are up to date.
安装ros Melodic版本:
sudo apt-get install ros-melodic-desktop-full
安装rosdep:
yfm@ubuntu:~$ sudo apt install python-rosdep
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following packages were automatically installed and are no longer required:
fonts-liberation2 fonts-opensymbol gir1.2-gst-plugins-base-1.0 gir1.2-gstreamer-1.0
gir1.2-gudev-1.0 gir1.2-udisks-2.0 grilo-plugins-0.3-base gstreamer1.0-gtk3 libcdr-0.1-1
libclucene-contribs1v5 libclucene-core1v5 libcmis-0.5-5v5 libcolamd2 libdazzle-1.0-0
libe-book-0.1-1 libedataserverui-1.2-2 libeot0 libepubgen-0.1-1 libetonyek-0.1-1
libevent-2.1-6 libexiv2-14 libfreerdp-client2-2 libfreerdp2-2 libgc1c2 libgee-0.8-2
libgexiv2-2 libgom-1.0-0 libgpgmepp6 libgpod-common libgpod4 liblangtag-common liblangtag1
liblirc-client0 liblua5.3-0 libmediaart-2.0-0 libmspub-0.1-1 libodfgen-0.1-1 libqqwing2v5
librevenge-0.0-0 libsgutils2-2 libssh-4 libsuitesparseconfig5 libvncclient1 libwinpr2-2
libxapian30 libxmlsec1-nss lp-solve media-player-info python3-mako python3-markupsafe
syslinux syslinux-common syslinux-legacy usb-creator-common
Use 'sudo apt autoremove' to remove them.
The following NEW packages will be installed:
python-rosdep
0 upgraded, 1 newly installed, 0 to remove and 0 not upgraded.
Need to get 3,284 B of archives.
After this operation, 21.5 kB of additional disk space will be used.
Get:1 http://mirrors.ustc.edu.cn/ros/ubuntu bionic/main amd64 python-rosdep all 0.22.1-1 [3,284 B]
Fetched 3,284 B in 0s (19.8 kB/s)
Selecting previously unselected package python-rosdep.
(Reading database ... 233509 files and directories currently installed.)
Preparing to unpack .../python-rosdep_0.22.1-1_all.deb ...
Unpacking python-rosdep (0.22.1-1) ...
Setting up python-rosdep (0.22.1-1) ...
初始化rosdep:
yfm@ubuntu:~$ sudo rosdep init
ERROR: Rosdep experienced an error: ('The read operation timed out',)
Please go to the rosdep page [1] and file a bug report with the stack trace below.
[1] : http://www.ros.org/wiki/rosdep
rosdep version: 0.22.1
Traceback (most recent call last):
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 146, in rosdep_main
exit_code = _rosdep_main(args)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 444, in _rosdep_main
return _no_args_handler(command, parser, options, args)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 453, in _no_args_handler
return command_handlers[command](options)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 597, in command_init
data = download_default_sources_list()
File "/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py", line 326, in download_default_sources_list
f = urlopen_gzip(url, timeout=DOWNLOAD_TIMEOUT)
File "/usr/lib/python2.7/dist-packages/rosdep2/url_utils.py", line 50, in urlopen_gzip
response = urlopen(url_request, **kwargs)
File "/usr/lib/python2.7/urllib2.py", line 154, in urlopen
return opener.open(url, data, timeout)
File "/usr/lib/python2.7/urllib2.py", line 429, in open
response = self._open(req, data)
File "/usr/lib/python2.7/urllib2.py", line 447, in _open
'_open', req)
File "/usr/lib/python2.7/urllib2.py", line 407, in _call_chain
result = func(*args)
File "/usr/lib/python2.7/urllib2.py", line 1248, in https_open
context=self._context)
File "/usr/lib/python2.7/urllib2.py", line 1208, in do_open
r = h.getresponse(buffering=True)
File "/usr/lib/python2.7/httplib.py", line 1178, in getresponse
response.begin()
File "/usr/lib/python2.7/httplib.py", line 452, in begin
version, status, reason = self._read_status()
File "/usr/lib/python2.7/httplib.py", line 408, in _read_status
line = self.fp.readline(_MAXLINE + 1)
File "/usr/lib/python2.7/socket.py", line 480, in readline
data = self._sock.recv(self._rbufsize)
File "/usr/lib/python2.7/ssl.py", line 754, in recv
return self.read(buflen)
File "/usr/lib/python2.7/ssl.py", line 641, in read
v = self._sslobj.read(len)
SSLError: ('The read operation timed out',)
这里会报错,看着是超时,懒得去看原因了,直接开了个梯子再执行
yfm@ubuntu:~$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
rosdep update:
yfm@ubuntu:~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Add distro "foxy"
Add distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/yfm/.ros/rosdep/sources.cache
这里一直超时,一直重新试,一直失败,最后开了个全局梯子一次OK。
添加环境变量:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
相关文章
文章评论
添加评论
点击排行
本栏推荐
标签云
热评文章
- django使用qq邮箱发送邮件
- mysql8设置数据库远程连接
- pip修改下载源为国内源
- win10看不到win7共享的文件夹的解决方法
- SQLyog连接 Mysql 8.0.11 报error no.1251- Client does not support authentic...
- 使用Oracel Net Nanager配置Oracle数据库远程访问
- 将anaconda的下载源切换为国内的源
- Python+selenium+firefox设置代理IP
- selenium+firefox+js实现动态设置firefox浏览器代理IP
- scrapy文件下载(高新技术企业认定网)
- Python调用JS代码
- Chrome浏览器的overrides的使用
站点信息
- 建站时间:2021-01-01
- 网站程序:Django 3.1.2
- 文章统计:54篇
- 文章评论:73条
- 统计数据:
#2026-01-29 08:53 @ Josephbooge:
很难找到, 如此积极的氛围。你们最棒。 <a href=https://iqvel.com/zh-Hans/a/%E5%B8%8C%E8%85%8A/%E5%8F%A4%E9%9B%85%E5%85%B8%E9%98%BF%E5%93%A5%E6%8B%89>城邦政治起源</a> 欣赏你的照片, 我感受到, 旅行带来灵感。谢谢 积极能量。